簡単・電子工作!ラズベリーパイできること。初心者向け電子回路の使い道。
第8章 ラズベリーパイでモーター制御(電子工作)
ロボットには必ず出てくるモーター制御にチャレンジします。
最近は「モータ」と表記することも多いですが、ここでは「モーター」と表記します。
部品を準備しよう
![]() ブレッドボード BB-102
ブレッドボード BB-102
動作の電圧が違うのとモーターは回転するので、新しいボードとします。
写真のように、(お道具箱などの)プラスチック箱にいれておくと片付けに便利なだけでなく、線の外れなどのトラブル防止になります。
電池ボックスからの電線をプラスの穴とマイナスの穴にそれぞれ差し込みます。
![]() DCモーター RE-280RA-2865 3Vで回転します
DCモーター RE-280RA-2865 3Vで回転します
(より線の電線をはんだ付けします)

(回転するのが分かるように軸に何かつけておきます。)
![]() モータードライバー TA7291P
モータードライバー TA7291P
![]() 1/4W抵抗 10kΩ
1/4W抵抗 10kΩ
![]() 単芯電線 色は写真と同じもの ちょうどよい長さとしましょう
単芯電線 色は写真と同じもの ちょうどよい長さとしましょう
![]() ブレッドボードジャンパーワイヤー・オスオス 長4本
ブレッドボードジャンパーワイヤー・オスオス 長4本
![]() 電解コンデンサー 10μF16V 白い帯の側がマイナスです
電解コンデンサー 10μF16V 白い帯の側がマイナスです
![]() セラミックコンデンサー 0.1μF ・LED お好きなもの LEDの長い足は右側です(電池のスイッチを入れると光ります)
セラミックコンデンサー 0.1μF ・LED お好きなもの LEDの長い足は右側です(電池のスイッチを入れると光ります)
![]() 1/4W抵抗 10kΩ
1/4W抵抗 10kΩ
![]() チェック端子 赤と黒 TEST-1(R) TEST-1(BK) 各1
チェック端子 赤と黒 TEST-1(R) TEST-1(BK) 各1
テスターで電圧を図る時にICクリップではさんで使います。無くてもOKです。 (これは電池電圧3Vのチェック用です。)
![]() 電池ボックス 単3×2本 リード線・スイッチ付き BH-321-1AS
電池ボックス 単3×2本 リード線・スイッチ付き BH-321-1AS
(模型用の1.5Vのモーターを使う場合は、単3×1本のタイプとします。)
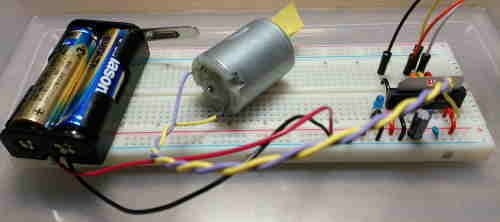
部品を差し込む
写真のようにブレッドボードにそれぞれの部品を差し込みます。
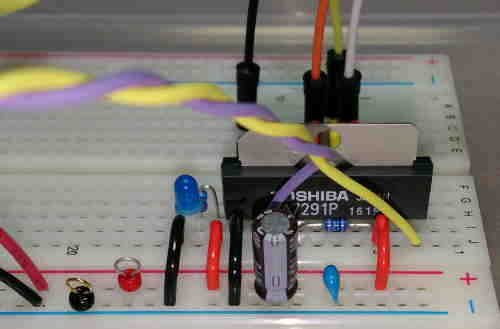
前から見た写真です↓
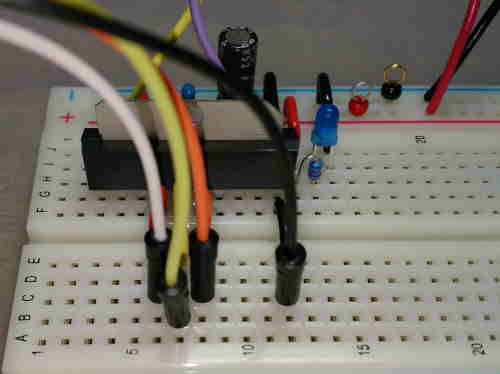
後ろから見た写真です↓
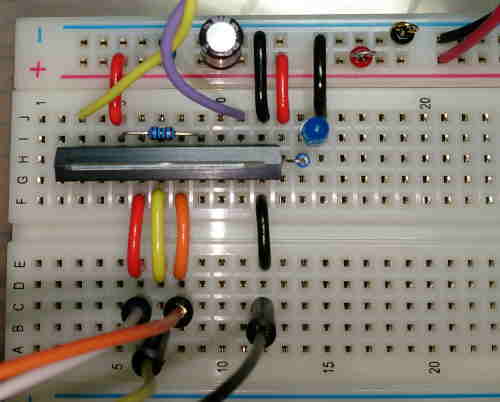
上から見た写真です↓
コンデンサーは、モーターからの電気ノイズがほかの回路へ影響しないように、必ずつけます。
ラズベリーパイにつなぐためのブレッドボードジャンパーワイヤー・オスオスを差し込みます。
ラズパイとつなぐ端子番号は、黒が6、橙が32、白が2、黄色が33です。
プログラムの入力
モーターを動かすプログラムを入力します。
「mootaa.py」とします。
このプログラムでは、徐々に回転を速めていって最高速度になったら次は遅くします。
一旦停止してから、次に、逆回転で同様に回して、これらの動作を繰り返します。 ロボットでも、同じ様な加減速をしています。
スイッチで回転方向を切り換えるだけだと、なめらかな回転の変化はできません。 これもラズベリーパイを用いた電子工作だからできるものです。
プログラムは音を出すプログラムと似ていますので、自分で中身を理解してみましょう。
プログラムを動かしましょう
プログラムを動かしてみましょう。 上手く動きましたか。
よく見てみると、動き出すとき、ぎこちないですね。 これは動き出すのに必要な電気が少し足りないためです。
モーターの始動時のよくある特性を学びました。
もっと複雑なプログラムにして、ロボットのような制御が出来るようになる日は、そう遠い話ではありません。 今後も電子工作を続けましょう。
